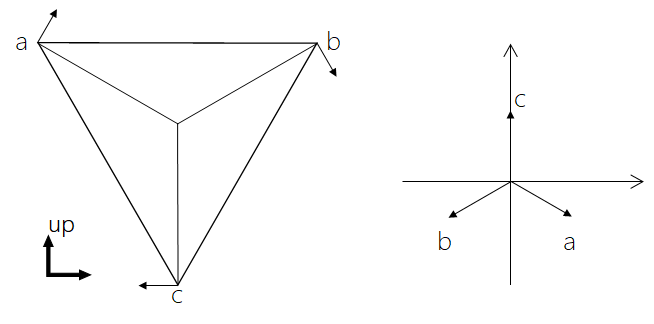
定义三轮车的三个轮子分别是 A、B、C, 速度分别是a、b、c;
定义半径 Radius 是中点到轮子的距离;
定义 a,b 为前轮,c 为后轮。
汇总链表的题目
1 | # Definition for singly-linked list. |
The distance transform of a region of foreground pixels in a background of zeros is the distance from every pixel to the nearest nonzero valued pixel.
背景为零的前景图距离变换指的是:每个像素到最近的非零值像素的距离。比如:
$$
\begin{array}{lllll}{0} & {0} & {0} & {0} & {0} \\ {0} & {1} & {1} & {1} & {0} \\ {0} & {1} & {1} & {1} & {0} \\ {0} & {0} & {0} & {0} & {0}\end{array}\quad\quad\quad\quad\quad
\begin{array}{rrrrrr}{1.41} & {1} & {1} & {1} & {1.41} \\ {1} & {0} & {0} & {0} & {1} \\ {1} & {0} & {0} & {0} & {1} \\ {1.41} & {1} & {1} & {1} & {1.41}\end{array}
$$
首先安装依赖:
1 | sudo apt update |
然后安装用于管理用户和项目的 Gitosis
1 | git clone https://github.com/res0nat0r/gitosis.git && cd gitosis |
记录 nodejs 的安装过程
直接用 apt 安装的 nodejs 不是最新版
需要到官网下载:
1 | wget https://npm.taobao.org/mirrors/node/v10.15.3/node-v10.15.3-linux-x64.tar.xz |
解压 .xz 文件使用:
1 | tar -xvf ***.tar.xz |
tar 命令是一个参数很多的命令
记录 vsftpd 的配置
ubuntu 上的 ftp 可以说是配置了一万遍了,最初学 Linux 命令都没学全的时候就开始配置 vsftpd 了。但是,泪奔的是每次配置都要弄半天,心中好似一万头草泥马跑过 (╯‵□′)╯︵┻━┻
这次一定详详细细的记录一下
vsftpd 是 very secure FTP daemon 的缩写(非常安全的 FTP 守护程序)
安装:
1 | sudo apt install vsftpd |